


地址:广州市环市东路466号大院7号107房
邮编:510075
电话:(020)87656975
手机: 13632422538
传真:(020)37611407
Q Q:459163728
邮箱:459163728@qq.com
营业时间:
周一到周五:8:30--17:30
周六周日: 8:30--17:00
远程无线遥控测量机器人变形监测系统在大坝外部变形和滑坡位移监测中的应用
建筑物变形监测是反映大坝安全状态的三大物理量之一,变形监测包括水平、垂直位移等监测;滑坡突发性强,危害巨大,是我国分布最为广泛的地质灾害类型。近几年来,我国非常重视对滑坡的安全监测及预报,并从不同角度、采用不同方法致力于该项具体研究工作。
建筑物变形监测和工程滑坡监测常采用大地测量法、工程测量法和安全监测自动化等方法。早期的视准线法、测角交会法等大地测量观测由于受到测角精度的影响,已无法达到理想的效果;安全监测自动化系统投入大、维护管理工作要求高。随着高精度全站仪的发展及应用,采用测边、测角的交会观测己完全突破了传统测量观念上的障碍,边角交会法观测无论从测点布设以及观测工作量来说都有其独特的优势。全站仪采用边角交会法及三角高程法进行三维坐标观测,能同时观测测点的三维坐标,从而得到水平、垂直位移量。只要采用合适的仪器及合理的观测方法,可取代常规水平位移(如准直线法、交会法等)及垂直位移(如几何水准法、静力水准法等)的观测,不失为一种灵活方便、高效经济的观测手段,对大坝等建筑物的变形观测能收到事半功倍之效,有其广泛的应用前景。 变形和滑坡位移监测具有范围广、环境条件差、目标点数多、观测周期频繁、精度要求高等特点,如果采用大地测量方法进行人工观测,不仅速度慢,而且对测量人员的技术水平要求高。为此,我们设计开发了基于徕卡TCA1000系列全站仪的远程无线遥控测量机器人变形监测系统,拓展了全站仪的功能,大大提高了观测质量和工作效率。
二、系统构架
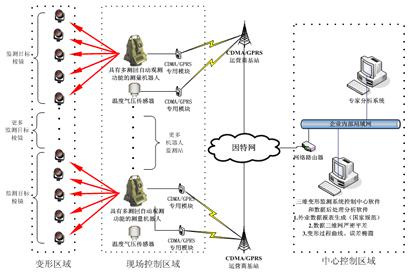
远程无线遥控测量机器人变形监测和分析系统主要由三个单元组成:控制单元、无线通讯单元和数据采集单元。控制单元一般安放在办公室内,通过具有固定IP的万维网发送指令和接收数据;无线通讯单元与数据采集单元通过有线形式连接,将控制单元的指令转发给数据采集单元并将数据采集单元的数据简单处理后转发给控制中心;数据采集单元置于作业现场,根据控制单元的指令采集相应数据。该系统的基本结构如下图所示。
三、硬件构成
远程无线遥控测量机器人变形监测和分析系统硬件主要由以下几项构成:
1、测量机器人
为实现远程控制采集数据,系统要求测量机器人具有马达驱动和目标自动识别等功能。根据精度要求,用户可以选用相应级别的测量机器人,如TCA2003或TCA1800,其静态测角精度分别为±0.5"和±1",测距精度分别为1mm+1ppm和1mm+2ppm。自动目标识别的有效距离可达1000m,望远镜照准精度2mm/500m。
2、无线通讯模块
要实现通过控制中心控制测量机器人采集数据,必须在两者之间建立可靠的通讯链路,理论上,有以下几种方式可以选择:
①、直接通过数据线将测量机器人与控制中心连接。优点是成本低,在短距离内数据传输相对可靠;缺点是随着数据线长度的增加,信号衰减严重,需要增加信号放大设备,即便如此,其作用距离一般在100米以内。对于滑坡监测来讲,该数据链路显然不合适。
②、通过数传电台建立通讯链路。优点是几乎可以在任何地方工作,不用考虑是否具备网络信号和卫星信号;缺点是扩展性差,作用距离最多只能达到二十多公里,并且需要得到无线电管理委员会等相关管理部门的审批。
③、基于移动或联通信号网络的短信模式。即测量机器人和控制中心各连接一个短信模块,控制指令和采集到的数据以短消息的形式发送。优点是只要有手机信号即可,距离不受限制;缺点是短信会有延迟、丢失现象,实时性差,通讯效率低。
④、通过Internet建立通讯链路。可分为有线方式和无线方式:有线方式是在测量机器人端连接一个调制解调器,然后通过网线或光纤接入互联网,同时将控制中心接入互联网,从而可以建立一个专用的通讯链路。该方式可以稳定、高效的实现远程控制和数据传输,并且不受距离限制,但是,实际的监测现场条件一般都比较恶劣,甚至是在深山峡谷之中,将网线或光纤接入到现场是不现实的。无线方式是在测量机器人端连接一个无线通讯模块(CDMA或GPRS),控制中心与具有固定IP地址的万维网连接,无线模块打开后,自动上线并且自动访问控制中心的固定IP,进而建立通讯链路。
在本方案中,我们采用基于Internet的无线通讯数据传输方式。
3、系统控制中心
系统控制中心的服务器或者工作站上需要安装可以连接公网的调制解调器或者网卡,并且拥有网络路由器分配的可通过公网访问的固定公网IP地址,用来接收通过公网传输的GPRS或者CDMA无线传输数据,此任务由专门的远程中心控制软件完成。
四、软件构成
无线遥控测量机器人变形监测和分析系统软件主要有三部份组成:即测量机器人机载软件、无线通讯软件模块和控制中心软件包。软件框架可以用以下图来表示:
1、测量机器人机载软件
1) 这一部分主要是遵照国家三角测量作业规范编写的“测量机器人多测回自动观测机载软件”,负责自动照准目标、自动测角、自动测距及超限或目标丢失等异常情况的自动处理。徕卡为测量机器人的用户提供了可以自主开发的机载编程平台,使得测量机器人能够做一些测量以外的额外工作,从而使得测量效率大大提高。
2、无线通讯模块程序
主要负责建立通讯链路,用来转发指令或数据。通讯模块收到控制中心指令后,解析出指令内容,然后转发给测量机器人;收到测量机器人数据后,按照约定的数据格式,打包后发送到控制中心。
主要实现发送开关机、观测、测温等控制指令和接收观测状态、测量数据。这一部分命令为开放指令,可以根据实际需要灵活定制项目的中心控制软件界面。
此外,该控制中心软件还包含有SQL Server数据库管理和三维网数据后处理平差模块。通过Internet接收到的无线数据包经过SQL Server数据库管理模块直接自动输入到SQL Server大型数据库中,通过控制中心软件的图形用户界面,用户还可以实时了解前端测量机器人自动测量的实时完成状态。
五、系统特点及应用领域
1. 基于性能稳定、功能卓越的徕卡TCA1000系列测量机器人;
2. 系统结构灵活,远程GPRS/CDMA无线控制和“现场+事后处理”两种模式均可适用;
3. 多台测量机器人可同时自动并行工作,系统通讯和计算荷载分配平衡;
4. 真正意义上实现了自动化、智能化和内外业一体化作业;
5. 数据接口开放,可以根据应用定制中心控制程序。
该系统非常适合应用于高速公路、铁路、露采矿山、水利工程、工厂等人工高陡边坡、自然边坡或滑坡的变形监测。目前浙江桐柏抽水蓄能电站面板坝、华光潭电站大坝、乌溪江电站大坝、紧水滩电站大坝、上标一、二级电站大坝自动变形监测系统即根据工程实际条件需要采用了“现场+事后处理”模式,将现场自动测量机器人通过“测量机器人多测回自动观测机载软件”自动测量获取的监测数据拿回到内业通过三维网平差软件处理后获得历次监测点的精确三维位置。
浙江大学防灾中心还应用该系统进行了高速公路滑坡自动监测的应用,目前已经通过防灾中心测试,作为大范围滑坡监测的首选方案拟编入《浙江省高速公路养护规范》中推广。
用户评论: 系统性能稳定性很高,操控简便,精度基本满足用户需求。配套软件功能齐全,便于后续处理。

粤ICP备06015830号 Copyright© 2014 www.moderngis.com.cn All Right Reserved